
НПП Центральная лаборатория автоматизации измерений
111250 Москва, Энергетическая улица, д.7, офис 311
(495) 134-03-49
E-mail: Данный адрес e-mail защищен от спам-ботов, Вам необходимо включить Javascript для его просмотра.
Обратный маятник
Целью данной работы является разработка лабораторного стенда, представляющего собой обратный маятник и систему управления им. Система управления должна быть разработана с использованием программных и аппаратных средств компании National Instruments: пакета LabVIEW и модуля ввода-вывода NI ELVIS. Стенд предназначен для изучения различных алгоритмов управления и испытания их на реальной модели.
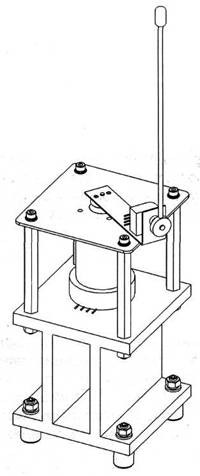
Рис. 1
Данный стенд состоит из конструкции маятника (рис. 1.), компьютера с установленным пакетом LabVIEW и платы PCI для обмена информацией с программным обеспечением верхнего уровня, к которой подключен модуль ELVIS. Модуль ELVIS содержит схему на основе печатной платы управления маятником, а именно: аналоговый выход для управления двигателем постоянного тока, а также два цифровых входа для получения значений энкодеров, показывающих горизонтальное и вертикальное отклонение маятника от центрального положения. Так как пакет LabVIEW довольно ресурсоемкий, программа управления создана в двух вариантах: с интерфейсом пользователя для производительных компьютеров и без интерфейса для устаревших. В интерфейсе программы отображаются текущие значения положения маятника, его скорости и ускорения. А так же, элементы управления: запуск калибровки и т.п.
Принцип работы установки заключается в следующем: при выставлении маятника в исходное (вертикальное) положение он находиться в состоянии неустойчивого равновесия и стремиться выйти из него (упасть). Задача системы - удерживать маятник в состоянии неустойчивого равновесия. Это достигается за счет изменения положения опоры маятника, двигатель поворачивает опору маятника, подводя ее под маятник. Кинематика системы обуславливает высокие скорости обработки информации, поэтому необходима высокая частота дискретизации (частота работы системы 200 Гц, т.е. примерно каждые 5мс контролирующая система принимает решение о дальнейшем управлении).
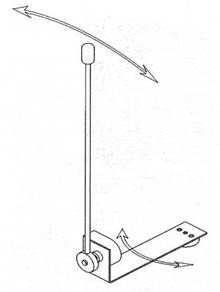
Рис.2
Определение положения маятника осуществляется энкодерами, один из которых показывает отклонение маятника от вертикальной оси (Y координата), а другой - азимут опоры маятника (X координата) (Рис. 2). Информация от энкодеров попадает в виртуальный прибор LabVIEW, в котором реализована логика управления маятником. По получаемым значениям энкодеров определяется скорость и ускорение маятника в двух координатах. С использованием этих значений ПД2 - регулятор подбирает необходимую амплитуду и полярность напряжения, подаваемого на двигатель.
Так как пакет LabVIEW ориентирован именно на такие или подобные инженерные задачи, то позволил реализовать программу управления и интерфейс в достаточно сжатые сроки по сравнению с другими пакетами программирования. В пакете присутствуют уже готовые решения по регулированию (ПИД- регулятор, различные регуляторы и т.п.), создание элементов управления в интерфейсе, так же, не требуют особых усилий. В учебном процессе такой стенд играет роль тренажера для алгоритмов управления. Студенты могут разрабатывать разные алгоритмы управления, проверять их на реальной модели обратного маятника и сравнивать расчетные и реальные параметры того или иного регулятора. Изучение подобных систем трудно переоценить, так как система управления обратным маятником - довольно распространенная задача во многих отраслях промышленности, а требования к алгоритмам управления постоянно повышаются. Любая ракета представляет собой обратный маятник, так как ее двигатель расположен ниже центра тяжести и подобных систем довольно много не только в космонавтике.
Сложность реализации подобных систем управления заключается в нелинейности уравнений, описывающих поведение объектов управления. Второй проблемой является отличие реальной системы от ее математической модели из-за всевозможных неучтенных в математической модели факторов, воздействующих на систему: внешние механические воздействия, неточности изготовления механических узлов и прочие флуктуации.
Рис. 3
На рис. 3. приведен образец стенда, на котором отлажены программа и алгоритмы управления. В дальнейшем планируется изготавливать свои стенды. Образец уже неограниченное время может сохранять состояние неустойчивого равновесия и отрабатывает «единичный скачек», т.е. при ударе по маятнику он возвращается в исходное положение.