
НПП Центральная лаборатория автоматизации измерений
111250 Москва, Энергетическая улица, д.7, офис 311
(495) 134-03-49
E-mail: Данный адрес e-mail защищен от спам-ботов, Вам необходимо включить Javascript для его просмотра.
Симуляция отклика импульсного радиолокационного сигнала и его FFT анализ в программной среде Lab VIEW 7.1
1. Постановка задачи
Целю настоящей работы является модернизация характеристик радиолокационной станции (РЛС), действующей на гористой местности, на основе современных средств и методов обработки цифровых данных.
Как справедливо указывается во многих источниках, в частности в [1,2], продукты National Instruments являются одними из мировых лидеров рынка высоких технологий задач управления, получения и обработки экспериментальных данных. Современный уровень быстродействия АЦП, а также богатые возможности графического программирования в среде LabVIEW позволяют решать достаточно сложные задачи, в том числе и в области радиолокации, с учетом ограничений и специфических особенностей этих конкретных задач.
Если под прямой задачей РЛС подразумевать обнаружение движущихся объектов и измерение основных параметров их движения, а под обратной - исходя из пределов изменения этих параметров - выбор характеристик и конструирование самой РЛС, то сложность задачи ПО заключается в том, что часто приходится решать одновременно многие элементы обеих задач.
Симуляция входного сигнала приемника и дальнейший его FFT анализ при различных отношениях сигнал/шум, осуществлены для следующих характеристик РЛС:
1. Ширина диаграммы направленности приемо-передающей антенны по азимуту и по углу места - соответственно 4,5 и 22,5 градусов;
2. Скорость вращения антенны - 2π/3 рад/с;
3. Период повторения зондирующих импульсов - 320 мкс;
4. Длительность элементарного импульса - 75 мкс;
5. Максимальная дальность обнаружения объектов - 50 км;
6. Максимальная скорость движения объектов - 250 м/с;
7. Максимальное количество объектов за один оборот антенны - 80
8. ПЧ приемника - 30 МГц;
9. Стабильность частоты гетеродина приемника-10-6.
2. Описание решения
При симуляции сигнала приемника его амплитуда, фаза и частота модулируются при помощи генераторов случайных чисел, при этом глубина модуляции относительно опорных значений этих величин выбирается, исходя из вышеуказанных характеристик РЛС. Сигнал аддитивно складывается с гауссовским шумом с возможностью плавной регулировки отношений их амплитуд.
Симулированный таким образом сигнал поступает на вход FFT анализатора (Рис. 1). Скорость оцифровки выбрана 67,11 МГц, исходя из требований теоремы Найквиста и необходимого количества усреднений за один оборот антенны.
Как видно из Рис. 1, основные результаты FFT анализа высвечиваются на лицевой панели виртуального инструмента как в виде соответствующих графиков, так и в матричных формах. Кроме того, предусмотрена возможность сохранения результатов анализа в виде графиков, заключенных в html файл (Рис. 2-5). Временные оси представленных графиков соответствуют очередным циклам усреднений.
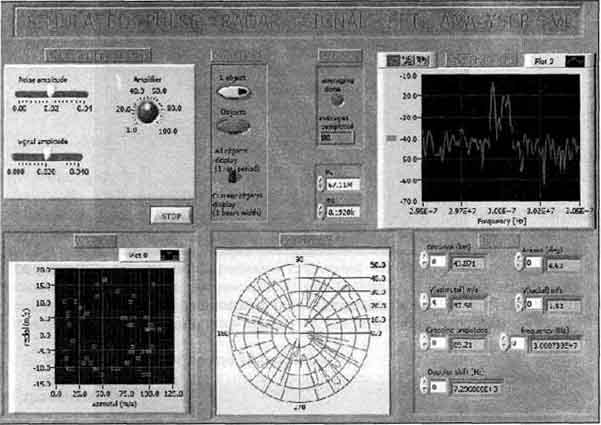
Рис. 1 Лицевая панель виртуального инструмента (RSA*.vi).
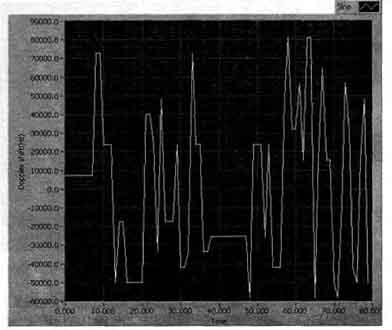
Рис. 2 Результаты анализа по доплеровскому сдвигу объектов.
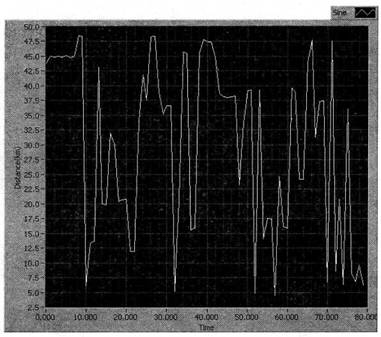
Рис. 3 Результаты анализа по расстоянию объектов.
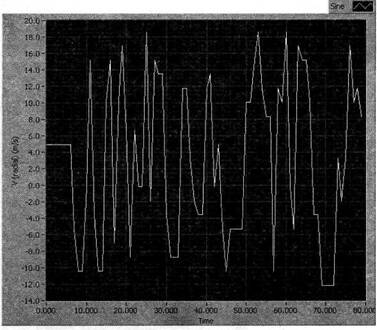
Рис. 4 Результаты анализа по радиальным скоростям объектов.
Рис. 5 Результаты анализа по азимутальным скоростям объектов.
Графики, представленные на Рис. 2-5 соответствуют одному из запусков программы в режиме обзора антенны РЛС при его одном обороте. Кроме этого режима предусмотрены также режим выдачи выходных данных через каждые 5 усреднений и режим непрерывного слежения «оператором» за объектами, появляющихся в зоне видимости антенны РЛС. В последнем случае в выходном html файле запоминаются выходные данные, соответствующие последнему циклу усреднения в момент остановки работы программы.
3. Используемое оборудование и ПО
Программа составлена на платформе Windows XP с использованием программного пакета LabVIEW 7.1.
4. Основные выводы и развитие решения ,
В настоящее время разработанная нами программа находится в стадии дальнейшего усовершенствования. Гибкость и дружественный интерфейс программной среды LabVIEW, а также наличие богатого арсенала готовых приложений (виртуальных инструментов) внушают надежду, что нам удастся не только модернизировать и улучшить характеристики самой РЛС, но и при наличии соответствующих алгоритмов успешно решать и другие известные проблемы радиолокации, такие как критерийная обработка для устранения эхо-сигналов целей, находящихся за пределами дальности действия радиолокатора, формирование карты местных предметов, малоподвижных нецелеподобных объектов и т. п.
Список литературы
1. А.А.Андронов, А.В.Беляков, В.А.Гурьев, А.В.Якимов Интерактивная визуальная разработка приложений автоматизации научных и промышленных измерительно-управляющих систем в среде LabVIEW 6i National Instruments // Труды 2-го совещания по проекту НАТО SfP-973799 Semiconductors: Нижний Новгород, 2002 (эл. пуб. www.rf.unn.ru/NATO/2ws/SfP2 Andronov.pdf). С. 38-46.
2. Цифровая обработка радиолокационных сигналов на основе процессора Л1879ВМ1 / С. Миронов, В. Дударев, А. Богатое // Электроника: НТБ 2003. вып. 3. С. 66-71.