
НПП Центральная лаборатория автоматизации измерений
111250 Москва, Энергетическая улица, д.7, офис 311
(495) 134-03-49
E-mail: Данный адрес e-mail защищен от спам-ботов, Вам необходимо включить Javascript для его просмотра.
Применение NI VISION для геометрического анализа в медицинской эндоскопии
1. Постановка задачи
В настоящее время в диагностике и лечении различного рода заболеваний ведущую роль играют эндоскопические исследования. С их помощью можно проводить визуальный осмотр органов и тканей человека, ранее недоступных без серьёзного оперативного вмешательства.
Своевременная диагностика новообразований остается самым уязвимым местом в онкологии. Значительная часть больных начинает лечение в III-IV стадиях заболевания, что соответственно ведет к неудовлетворительным результатам лечения. В противоположность этому возможности диагностики раннего рака достигают 90-100%, что и определяет логичную задачу необходимости установки диагноза рака пищевода и желудка на ранних стадиях или динамического наблюдения за теми пациентами, у которых обнаруживаются предраковые изменения слизистой оболочки верхних отделов желудочно-кишечного тракта [2].
Наибольшие перспективы данной области медицинских исследований имеет медицинская видеоэндоскопия, позволяющая провести не только визуальный осмотр исследуемых органов, но и зафиксировать весь процесс исследования на разнообразные носители информации. Зарегистрированное таким образом исследование можно подвергать дальнейшему визуальному анализу с использованием передовых средств компьютерной техники и сохранять видеозапись для динамического контроля за больными, относящимся к "группе риска" развития рака.
Представляется, что разработка системы эндоскопического исследования с использованием программных технологий пакета Nl Vision корпорации National Instruments имела бы преимущества в виде сокращения усилий на проектирование программной части и в виде лёгкой стыковки пакета Nl Vision с разными источниками видеоданных.
Разрабатываемая система должна удовлетворять следующим исходным техническим характеристикам:
• Источник входного сигнала - цифровой выход видеопроцессора или стандартный аналоговый видеовыход эндоскопической видеокамеры, видеомагнитофона, видеоэндоскопа и т.д.
• Режим полноэкранного видео.
• Максимальный размер кадра видеосигнала 640×480 или 320×240.
• Количество цветов в сохраняемых кадрах до 16 777 216 (8/24 бит).
• Сохранение цветных и чёрно-белых изображений в форматах *.jpg, *.bmp, *.png, *.tif.
• Видеозаписи исследования в *.avi формате (кодек DivX).
• База данных должна содержать в себе полную информацию о пациентах, результатах обследований, а также все сохранённые изображения и видеозаписи исследований.
Задачи разрабатываемой системы:
• Оценка геометрических характеристик новообразований.
• Оценка цветовых характеристик новообразований - хромоэндоскопия.
• Автоматизация всех операций исследования и документирования. В соответствии с этим общая структура разрабатываемой системы представлена на рис. 1.
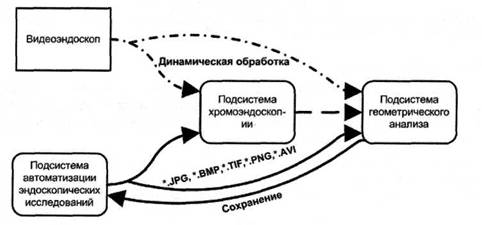
Рис. 1. Структура разрабатываемой системы
В работе обсуждается только подсистема геометрического анализа. Она должна производить измерение следующих характеристик:
• площадь поражённой поверхности;
• трёхмерная форма и объём новообразования;
• линейные размеры и размер в наибольшем измерении.
Схематично структура подсистемы геометрического анализа представлена на рис. 2.

Рис. 2. Структура подсистемы геометрического анализа
2. Описание решения
Подсистема геометрического анализа, в соответствии с рис. 2, состоит из модулей:
• выделения требуемого контура;
• расчёта площади контура;
• восстановления трёхмерной формы;
• измерения линейных размеров;
• определения размера в наибольшем измерении.
Для выделения требуемого контура необходимо выполнение следующих условий:
• Многоугольник должен быть простым;
• Обход контура должен производиться последовательно. Следовательно, требуется не просто получить координаты границ контура, а сформировать массив значений координат в последовательном обходе.
Для выделения отдельного контура из общей картины потребовалась разработка специального алгоритма. Учитывая тот факт, что часть функций NI IMAQ ведут обработку исключительно чёрно-белого изображения [3,4], требуется произвести цветовое преобразование таким образом, чтобы минимизировать возможность потери пикселей, прилегающих к границам контура. Для этого применяется бинаризация изображения с помощью IMAQ Convolute, IMAQ Local Treshold.
Следует отметить, что при использовании красителей на данном этапе используется подсистема хоромоэндоскопии, позволяющая, следуя чёткой логике цветового анализа изображения, проводить бинаризацию без использования требующей постоянной подстройки фильтрации (IMAQ Local Threshold).
В результате мы получаем изображение типа Grayscale, которое в последующем поступает на подсистему выделения контуров.
Для реализации возможности выделения требуемого контура было протестировано два различных метода: IMAQ Clamp Horizontal/Vertical Max/Min -поиск границ контура по вертикали и по горизонтали с возможностью нахождения внутренних точек контура и IMAQ Magic Wand - поиск координат пикселей границ контура, интенсивности которых удовлетворяют заданному пределу. Оценка правильности выделения проводилась путём графической реконструкции полученных координат границ контура. В качестве анализируемого изображения использовался контур, содержащий в себе т.н. «внутренние точки».
В результате сравнения этих методов предпочтение было отдано методу IMAQ Magic Wand. Выбор области поиска границ контура осуществляется щелчком мыши. После получения координат начального пикселя производится сравнение всех соседних пикселей на значение интенсивности. Любой пиксель, интенсивность которого не удовлетворяет заданному пределу, воспринимается как граница контура. На рис.3 представлен результат автоматического нахождения контура, а на рис.4 отображена графическая реконструкция координат границ контура, полученных с использованием блока IMAQ Magic Wand.
Данный метод удовлетворяет требованиям алгоритма расчёта площади. В ходе тестирования была проведена успешная графическая реконструкция. Так как анализируемое изображение подвергается бинаризации, процесс задания диапазона интенсивности не вызывает затруднений.
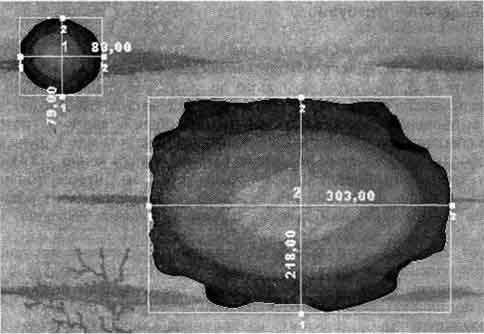
Рис. 3. Автоматический выбор контуров.
Для расчёта площади поражённой поверхности, в первую очередь, требуется отделить новообразование из всей картины изображения в целом. В данном случае речь идёт о выделении требуемого контура, ограничивающего новообразование. С использованием специальных красителей и отдельно разрабатываемой подсистемы хромоэндоскопии, можно добиться более точного выделения контура, так как не используется фильтрация бинарного изображения и вероятность удаления пикселей, характеризующих отдельные метастазы, сводится к минимуму.
Для расчёта площади поражённой поверхности используется формула вычисления площади простого многоугольника. Под простым многоугольником понимается такой многоугольник, границы которого не имеют самопересечений и самокасаний. Пусть вершины P1, P2,… Pn простого многоугольника перечислены в порядке обхода его границы. Для вычисления ориентированной площади простого многоугольника следует сложить площади треугольников OP1P2, OP2P3, … OPnP1 где О- произвольная точка плоскости. Модуль полученной величины и есть искомая площадь:
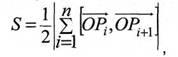
- где полагается Pn+1 = P1
Выбранный метод расчёт прошёл проверку на многоугольнике (рис. 5). Предварительно был произведён расчёт площади данного многоугольника посредством построения на миллиметровой бумаге. Результаты, полученные в результате использования выбранного алгоритма, совпали с результатами, полученными в ходе ручного расчёта.
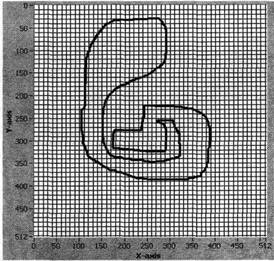
Рис. 4. Реконструкция координат границ контура
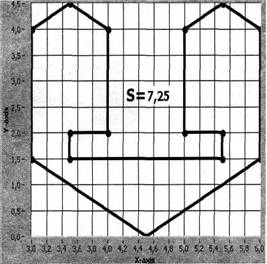
Рис. 5. Расчёт площади многоугольника.
Восстановление трёхмерной формы по изображению с помощью метода Shape from Shading - это восстановление трехмерной формы объекта по его закраске, т.е. плавному изменению яркости между точками объекта. При этом резкое изменение яркости соответствует либо границе объекта, либо тени от другого объекта [1].
При визуализации искусственных сцен яркость точки поверхности объекта зависит от ряда вполне определенных факторов и вычисляется по некоторой математической модели. Среди факторов, влияющих на яркость точки поверхности объекта, можно выделить основные:
■ свойства и расположение источников света;
■ характеристики поверхности, определяющие ее отражающие свойства;
■ ориентация участка поверхности, в пространстве;
■ точка зрения наблюдателя;
Простейшей моделью взаимодействия света с поверхностью является модель Ламберта, соответствующая "матовым" объектам, отражающим свет во всех направлениях одинаково. Для того, чтобы приблизить задачу к решаемому виду, делаются, в частности, следующие упрощения:
■ освещение предполагается параллельным,
■ альбедо поверхности предполагается постоянным для всех точек поверхности.
В результате получаем систему уравнений по числу точек изображения. Несмотря на большое количество упрощений, допущенных при приведении задачи к решаемому виду (простая модель отражения, один параллельный источник света, однородная поверхность), такая постановка задачи, тем не менее, имеет практическую ценность.
После окончательного формирования двумерного массива значений интенсивностей и их местоположения на общей картине анализируемого изображения, производится построение трёхмерной формы посредством блока 3D Surface.
Результаты восстановления трёхмерной формы реализованным методом представлены на рис. 6 и 7. Наличие «всплесков» на границах контура (рис. 6), связанно с достаточно резким переходом цветов (в данном случае от чёрного к белому).
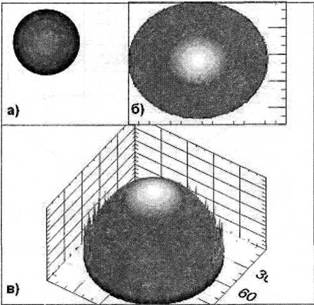
Рис. 6. Восстановление трёхмерной формы сферического объекта: а) - анализируемое изображение; б), в) - форма под различными углами обзора
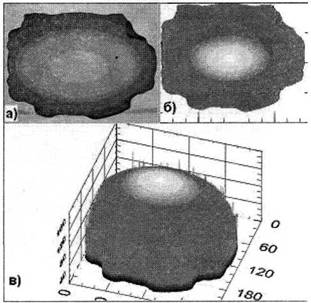
Рис. 7. Восстановление трёхмерной формы объекта произвольной формы: а) - анализируемое изображение; б), в) - 3D форма под различными углами обзора.
Реализованный алгоритм восстановления трёхмерной формы требует дополнительного тестирования. Вследствие необходимости воссоздания всей картины эндоскопических исследований в целом, проблематичным видится процесс получения поправочных коэффициентов. Также следует отметить, что данный алгоритм применим только в том случае, если объектив эндоскопа расположен перпендикулярно плоскости опухоли.
Было проведено тестирование двух алгоритмов расчёта объёма новообразования - метода накрытия эллипсоидом и метода суммы параллелепипедов. Все вычисления основываются на данных, полученных в ходе расчёта площади поражённой поверхности и восстановлении трёхмерной формы новообразования.
Расчёт объёма новообразования с помощью определения объёма как суммы параллелепипедов учитывает тот факт, что сетка формирования координат пикселей изображения является равномерной (рис. 8), и существует возможность просчитать объём поверхности как сумму объёмов содержащихся в ней параллелепипедов. Данный метод определения объёма гораздо точнее метода накрытия эллипсоидом.
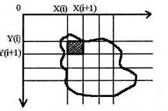
Рис. 8. Сетка формирования координат пикселей
Выведем формулу расчёта объёма по данному методу:

- где m и п - разрешение изображения.
Следует отметить, что чем больше разрешение анализируемого изображения, тем точнее улавливается плавный перепад цветов от пикселя к пикселю и, соответственно, тем точнее итоговый результат.
Метод расчёта объёма, как суммы параллелепипедов, уже на сферической поверхности чётко уловил перепад градации цвета на краях тест-объекта. Альтернативный ему метод, основанный на расчёте объёма накрывающего эллипсоида, оказался пригоден исключительно к сферическим поверхностям, и не пригоден к поверхностям произвольной формы, вследствие невозможности корректного охвата эллипсоидом всей поверхности в целом.
Вычисление расстояний между первичной опухолью и отдельными метастазами заключается в возможности автоматического определения расстояний между первичной опухолью и отдельными метастазами.
Зачастую, при использовании классификации TNM для постановки стадии злокачественности, требуется определить отсутствие или наличие метастазов в регионарных лимфоузлах (компонент N) и отдаленных метастазов (компонент М). При описании компонента N указывают отдалённость метастаза от первичной опухоли [2].
Критерием первичной опухоли в данной реализации является наибольшая площадь контура. При выделении требуемого контура, кроме массива координат его границ, формируется массив координат описывающего прямоугольника (Global Rectangle). Используя координаты четырёх вершин прямоугольника, можно без труда определить его центр. Далее после формирования линии и измерения её длины производится наложение полученного результата на анализируемое изображение. Результат наложения представлен на рис. 9.
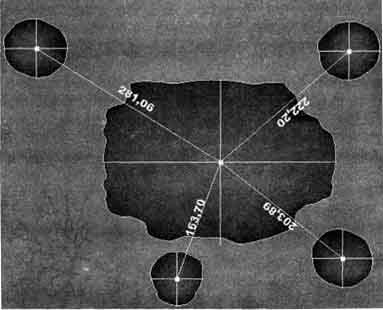
Рис. 9. Результат наложения полученных расстояний между первичной опухолью и отдельными метастазами
В результате проделанной работы разработана подсистема геометрического анализа изображений, являющаяся связующим звеном между подсистемой хромоэндоскопии и подсистемой автоматизации эндоскопических исследований. Для оценки размеров реализованы достаточно наглядные методы, возможности которых не ограничивают пользователя в измерении тех или иных участков новообразования. С учётом области медицины, для которой производилась разработка данной подсистемы, процесс определения характеристик при выделении контура, расчёте площади, восстановлении трёхмерной формы, расчёте объёма, вычислении размеров и расстояний максимально автоматизирован. При этом для некоторох из этапов возможно и ручное управление работой. Под ручным режимом понимается явное задание оператором того или иного параметра, влияющего на конечный результат. Автоматический режим не требует вмешательств в процесс вычислений. Например, выделение требуемого контура возможно как путём указания интересующей области щелчком мыши по области изображения (ручной режим), так и посредством формирования массива координат указателей контура (автоматический режим).
Все вычисления проводились как со статическим изображением (чтение файла), так и с изображением, поступающим с выхода WEB-камеры.
Относительная погрешность метода расчёта площади поражённой поверхности составила 2%.
7. Используемое оборудование и ПО
В качестве источников видеоизображения использовались Web-камеры с подключением по USB фирм Logitech и Genius. Подсистемы хромоэндоскопии, геометрического анализа и автоматизации исследований разработаны в среде проектирования LabVIEW 8 с использованием модуля NI Vision.
8. Внедрение и развитие решения
Система медицинской видеоэндоскопии разрабатывалась для применения врачами-специалистами в соответствующих отделениях больниц. Однако, путь от пилотного варианта системы до клинических испытаний может занимать несколько лет. Ближайшие направления развития - это расширенные испытания на фактическом материале, а также разработка полноценного автоматизированного рабочего места врача-эндоскописта.
Список литературы
1. Т.Н. Хацевич, И.О. Михайлов. Эндоскопы: Учеб. пособие. / Новосибирск: СГГА, 2002.
2. Сайт современной - онкологии http://www.consilium- medicum.com/media/onkology/05_03/104.shtml.
3. NI Vision for LabVIEW User Manual.
4. Nl IMAQ Vision Concepts Manual.