
НПП Центральная лаборатория автоматизации измерений
111250 Москва, Энергетическая улица, д.7, офис 311
(495) 134-03-49
E-mail: Данный адрес e-mail защищен от спам-ботов, Вам необходимо включить Javascript для его просмотра.
Система управления асинхронным тиристорным электроприводом
1. Постановка задачи.
Системы «Тиристорный преобразователь напряжения - асинхронный двигатель» («ТПН-АД») широко используются при построении устройств плавного пуска АД. Существующие устройства плавного пуска, как правило, обеспечивают формирование заданной диаграммы напряжения, ограничение тока или электромагнитного момента [1] двигателя.
При выполнении научно-исследовательской работы, проводимой на кафедре «Электропривод и автоматизация промышленных установок» УГТУ-УПИ, возникла необходимость анализа свойств системы ТПН-АД, имеющей в своём составе контур электромагнитного момента.
В работе рассматриваются вопросы построения системы автоматического регулирования (САР) электромагнитного момента асинхронного двигателя без датчика на его валу, питаемого от ТПН.
2. Описание решения.
Для реализации САР электромагнитного момента двигателя на базе системы ТПН-АД требуется наличие сигнала обратной связи по моменту. Установка датчика момента на валу двигателя, как правило, невозможна из-за повышенной сложности его конструкции. Поэтому возникает задача косвенной оценки момента АД на основе измерения электрических переменных двигателя (напряжение, ток).
Оценка мгновенного значения электромагнитного момента АД может быть получена при использовании следующего выражения:
где т - мгновенное значение электромагнитного момента двигателя; k = 1/ ωs - масштабный коэффициент, определяемый как величина, обратная угловой частоте напряжения на статоре ωs; Ps - активная мощность, потребляемая двигателем, которая может быть определена по выражению

где usa, usb, usc, isa, isb, isc - мгновенные значения напряжений и токов фаз А, В и С статора соответственно; ∆PS — мощность потерь в меди статора, вычисляемая по формуле
где Rs - активное сопротивление фазы обмотки статора.
Структура САР электромагнитного момента приведена на рис. 1. На рис. 1 изображены следующие элементы: РМ - регулятор момента интегрального типа; ФБ - функциональный блок, необходимый по условиям линеаризации и выполняющий операцию извлечения квадратного корня; СИФУ -система импульсно-фазового управления; ВМ - вычислитель момента.
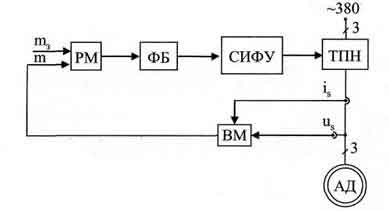
Рис 1. Структура САР электромагнитного момента АД
Описанная система выполнена в виде стенда [2], структура которого показана на рис. 2. Стенд состоит из короткозамкнутого асинхронного двигателя, тиристорного преобразователя напряжения, датчиков мгновенных значений тока is (ДТ) и напряжения us (ДН) и персонального компьютера (ПК), оснащенного платой сбора данных Nl PCI-6221 с системой LabVIEW.
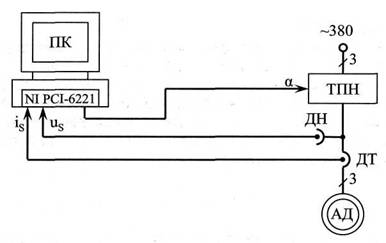
Рис. 2. Структура исследовательского стенда
При практической реализации САР момента нет необходимости в выдаче управляющего преобразователем сигнала на выбранном такте работы АЦП (т.е. каждые 0,0001 с) поэтому вместо выражений (2) и (3) использованы следующие алгоритмы:
расчёт которых проводится на периоде сети, равном 0,02 с. Стенд позволяет реализовать практически любые типы САР системы ТПН-АД путём модификации его программного обеспечения.
Особенностью ПО стенда является то, что часть программы, отвечающая за обработку сигналов, выполнена в виде функций динамически подключаемой библиотеки (DLL), созданной в системе программирования Delphi. В функциях библиотеки реализованы следующие задачи: определение электромагнитного момента двигателя по выражениям (1), (4) и (5), расчет регулятора момента и функционального блока.
Средствами LabVIEW выполнен опрос датчиков, выдача управляющих воздействий, отображение временных диаграмм всех сигналов (от датчиков и вычисленных программой) и формирование заданного значения момента двигателя. Код программы системы управления электроприводом показан на рис. 3.
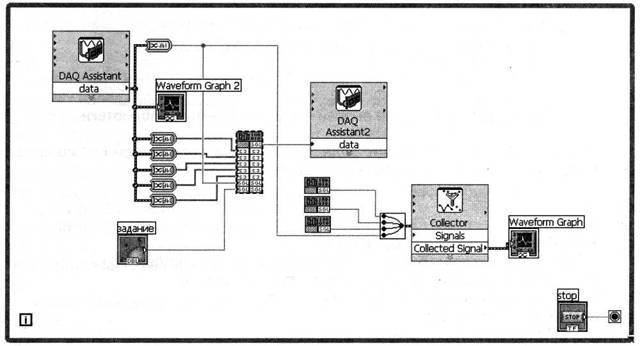
Рис. 3. Программа системы управления, реализованная в LabVIEW
Информация от датчиков тока и напряжения передается в узел вызова основной функции библиотеки в виде указателей на массивы, содержащие значения соответствующих сигналов, при этом рабочая частота АЦП и размер буферов выбраны таким образом, что массивы содержат значения сигналов на одном периоде сети (0,02 с). На рис. 4. показано диалоговое окно параметрирования узла вызова основной функции библиотеки, производящей все расчёты и формирующей сигнал управления преобразователем.
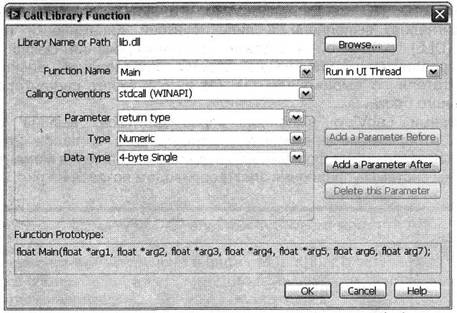
Рис. 4. Параметры узла вызова основной функции библиотеки
Функции библиотеки рассчитываются на частоте 50 Гц, сигналы датчиков тока и напряжения оцифровываются на частоте 10 кГц.
Диаграммы пуска электропривода с контуром электромагнитного момента представлены на рис. 5, 6.
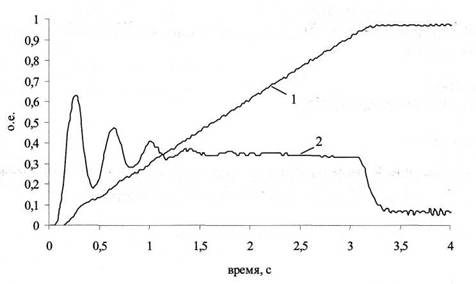
Рис. 5. Пуск привода с контуром момента на холостом ходу: 1 - скорость, 2 - электромагнитный момент АД
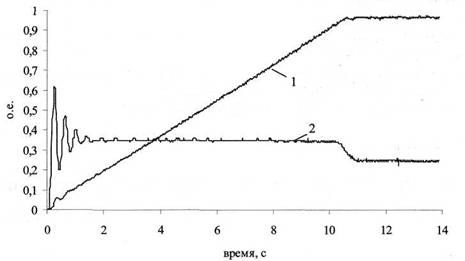
Рис. 6. Пуск привода с контуром момента при моменте сопротивления на валу Мс = 0,4 Мм: 1 - скорость, 2 - электромагнитный момент АД
Из приведённых диаграмм видно, что темп запуска привода сильно зависит от момента сопротивления на валу двигателя, а поддержание электромагнитного момента двигателя на заданном уровне обеспечивает плавный и безударный пуск двигателя, не гарантируя при этом постоянства темпа его разгона.
Список литературы:
1. Chouffier J., Cornilleau H., Duclos P. Control method for a start-up control unit and an apparatus to make use of this method // United States patent № 5859514, 01.12.1999.
2. Зюзев А. М., Нестеров К.Е. Стенд для исследования системы управления асинхронным тиристорным электроприводом на основе программно-аппаратных средств Natonal Instruments // Материалы пятой международной НПК «Образовательные, научные и инженерные технологийй в среде LabVIEW и технологии National Instruments». Москва: РУДН, 2006. С. 395-399.