
НПП Центральная лаборатория автоматизации измерений
111250 Москва, Энергетическая улица, д.7, офис 311
(495) 134-03-49
E-mail: Данный адрес e-mail защищен от спам-ботов, Вам необходимо включить Javascript для его просмотра.
Применение LabVIEW real-time module для моделирования электромагнитных процессов с целью отладки систем управления электрооборудованием на электроподвижном составе (ЭПС)
1. Введение.
Математическое моделирование физических процессов в настоящее время не представляется возможным без проведения расчета на ЭВМ, будь то поведение механической, электромагнитной или какой-то иной системы. Существуют специализированные компьютерные программы для решения задач связанных с моделированием электромагнитных процессов, позволяющие производить разработку модели без вывода систем дифференциальных уравнений, описывающих поведение исследуемой системы. Назначение этих программных комплексов заключается с одной стороны в снижении затрат времени на проектирование модели; с другой - в составлении адекватной математической модели, т.е. подходящей для замены физического аналога с учетом оговоренных допущений, для дальнейшего анализа с целью определения или уточнения интересующих параметров (показателей) в узлах системы и определения характеристик системы. В результате готовые модели зачастую выполняются, так сказать, не в «реальном времени», которое, собственно, и не требуется для проведения детального анализа.
Но что делать, если появляется потребность в модели, работающей в «реальном времени» и связи ее с какими либо внешними устройствами через физические сигналы? Примером в данном случае может быть связь модели с системой управления с целью отладки последней. Под отладкой системы управления, в данном случае, понимается отработка всевозможных для нее режимов работы, с такой особенностью что, если бы она была сопряжена с реальным устройством, а не с его моделью. Другими словами, преследуется цель максимально снизить разницу между устройством и его моделью по отношению к функционирующей системе управления этого устройства.
Модель, о которой пойдет речь, это электровоз переменного тока в режиме реостатного торможения. Эта модель предназначена для отладки блока управления реостатным тормозом (БУРТ).
2. Описание модели электровоза переменного тока ВЛ-80с в режиме реостатного торможения.
Модель электровоза, в соответствии с принципом разработки приложения реального времени (РВ), разбивается на две части. Первая часть является моделью электромагнитных процессов протекающих в силовых цепях электровоза, которая описана в виртуальном приборе (ВП), работающем под управлением операционной системы (ОС) РВ. Вторая часть является моделью движения поезда, учитывающая основное сопротивление движению поезда, оперативное изменение уклона пути, как следствие, изменение дополнительного сопротивления движению поезда от уклона и явление юза колесных пар. Вторая часть модели, так как не является критичной по времени, описана в ВП, работающем под управлением ОС Windows.
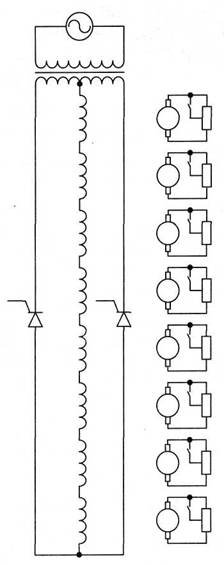
Рис.1 Схема электрической части модели.
На рисунке 1 изображен общий случай схемы электрической части модели.
В нее входят: модель трехобмоточного трансформатора, модель тиристоров, модель нагрузки (тяговые электродвигатели (ТЭД)).
Трансформатор является основной составляющей модели. Он представлен системой дифференциальных уравнений составленных по II закону Кирхгофа коэффициенты, при неизвестных которые являются собственные взаимоиндуктивности обмоток трансформатора. Свободные члены е системе уравнений являются ЭДС источнике напряжения и падения напряжения не активной составляющей обмоток. Количестве уравнений и, соответственно, количестве неизвестных равно количеству обмоток трансформатора (в данном случае три).
Тиристоры явно не участвуют е математической модели. В зависимости от состояния, в конкретный момент времен изменяется схема модели. Другими словами существует несколько схем модели, которым соответствуют составленные для каждого случая системы уравнений. В момент изменения состояния нелинейного элемента (открыт или закрыт) выражение используемое для расчета мгновенных величин, заменяется другим и расчет продолжается. Для этого ведется контроль величины напряжения и тока на тиристоре.
Элементы нагрузки дополняют систему уравнений, составленную для трансформатора, вследствие чего, модель электрической части становится полноценной (в данном случае сумма всех индуктивностей обмоток возбуждения ТЭД LOB складывается с собственной индуктивностью обмотки трансформатора W21 или W22) ТЭД, которых восемь, работают в данном случае в режиме генератора с независимым возбуждением. На рисунке 1 якорные обмотки двигателей обозначены символами I-VIII, а, соответствующие им обмотки возбуждения - ОВ1-ОВ8.
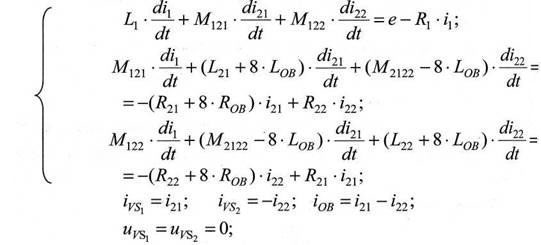
Ниже приведены системы дифференциальных уравнений, описывающих четыре возможных мгновенных схемы электрической части модели (исключение составляют контуры якорных обмоток двигателя - они неизменны), а также выражения позволяющие контролировать состояние тиристоров.
Первая мгновенная схема (VS1 и VS2 закрыты):
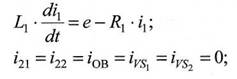

где:
L1 - собственная индуктивность первичной обмотки, Гн;
е - мгновенное значение ЭДС источника питания, В;
R1 - активное сопротивление первичной обмотки, Ом;
i1 - мгновенное значение тока первичной обмотки, А;
i21 и i22 - мгновенные значения токов обмоток W21 и W22, A;
i0B - мгновенное значение тока в обмотках возбуждения, А;
ivs1 и ivs2 - мгновенные значения токов в тиристорах, А;
uvs1 и uvs2 - мгновенные значения напряжений на тиристорах, В;
М121 и М122 - взаимоиндуктивности между обмоткой W1 и обмотками W21 и W22, Гн.
Вторая мгновенная схема (VS1 открыт; VS2 закрыт):
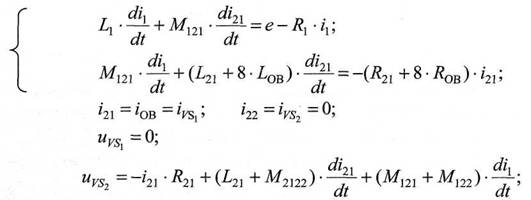
L21 - собственная индуктивность обмотки W2l, Гн;
L0B - индуктивность обмотки возбуждения ТЭД, Гн;
R21 - активное сопротивление обмотки W2l, Ом;
R0B - активное сопротивление обмотки возбуждения ТЭД, Ом;
М2122 - взаимоиндуктивность между вторичными обмотками W21 и W22, Гн.
Третья мгновенная схема (VS1 закрыт; VS2 открыт):
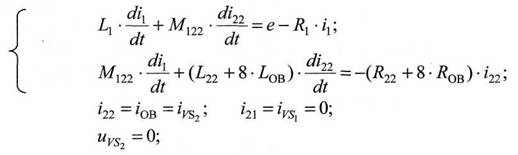

где:
L22 - собственная индуктивность обмотки W22, Гн;
R22 - активное сопротивление обмотки W22, Ом. Четвертая мгновенная схема (VS1 и VS2 открыты):
Расчет мгновенных значений производится решением дифференциальных уравнений на основе метода Эйлера.
При решении уравнений (1-4) определяется мгновенное значение тока возбуждения ТЭД iOB. Ток возбуждения используется для определения магнитного потока по характеристике намагничивания двигателя Ф(IОВ).
Затем следуют выражения позволяющие определить тормозную силу В и скорость движения поезда V.
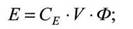
где:
Е - ЭДС вращения ТЭД, В;
СЕ - конструкционная постоянная ТЭД, 1/м
V - скорость электровоза, км/ч; Ф - магнитный поток ТЭД, Вб.
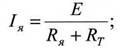
где:
IЯ - ток якорной обмотки ТЭД, А;
Rя - Активное сопротивление якорной обмотки ТЭД, Ом;
RT - сопротивление балластного резистора, Ом.

где:
Вд - тормозная сила одного ТЭД, Н.
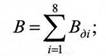
где:
В - тормозная сила электровоза, Н.
где:
W - сила сопротивления движению, Н;
т - масса поезда, кг.
Передняя панель ВП, работающего в Windows, показана на рисунке 2.
Диаграмма (рис 2а) представляет собой область определения тормозных характеристик электровоза, с нанесенными ограничениями по току возбуждения, по току якоря ТЭД и по силе сцепления колеса с рельсом. По оси абсцисс на ней отложена тормозная сила поезда, а по оси ординат - скорость.
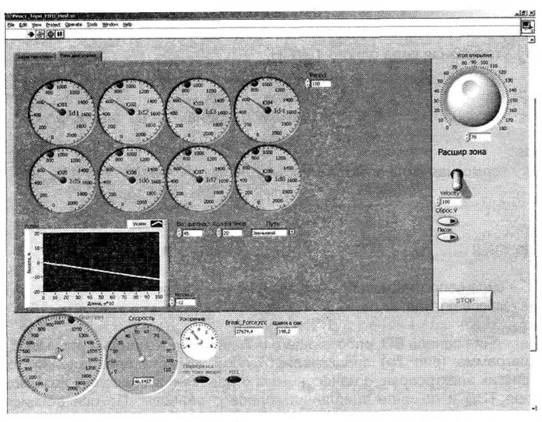
Рис.2 Передняя панель ВП а) с характеристикой реостатного торможения, б) с токами обмоток якорей.
Данная диаграмма демонстрирует (точка на диаграмме) значение тормозной силы и скорости. В соответствии с этим можно в любой момент времени оценить близость нахождения системы от ограничений.
Помимо этого, на передней панели выведены стрелочные индикаторы тока возбуждения, скорости и ускорения электровоза и, элементы управления углом открытия тиристоров и переключением на расширенную зону регулирования (уменьшение величины сопротивления балластного резистора). Информация об угле открытия тиристоров и переключении на расширенную зону регулирования в штатном режиме работы модели должна поступать от системы управления.
На рисунке 26, помимо прочего, выведены индикаторы токов якорных обмоток восьми ТЭД, задатчик уклона пути и задатчики параметров состава (количество и вес вагонов).
Работа с ВП начинается с установки начальной скорости торможения, которая осуществляется с помощью элемента управления «Velocity» и нажатия кнопки «Сброс V». При этом точка выставляется в исходное положение на диаграмме при заданной скорости. Далее производится изменения угла открытия тиристоров, вследствие чего, изменяется величина тормозной силы и замедление поезда.
При функционировании модели производился вывод мгновенных значений величин iОB, i1, i21, i22, u1, uОB, uVS1, uVS2, на восемь каналов цифро-аналогового преобразователя (ЦАП). Фрагмент временной диаграммы, иллюстрирующей мгновенные значения четырех параметров iОB, i21, i22, uVS2 продемонстрирован на рисунке 3
Рис.3 Временная диаграмма мгновенных значений (сверху вниз) тока возбуждения ТЭД iОB, тока вторичной обмотки W21, i21 тока вторичной W22 i22 обмотки и напряжения на тиристоре VS2 uVS2.
В данном случае интервал времени между выборками составляет 360 мкс. Но это значение может быть уменьшено до 150-200 мкс в зависимости от оптимизации модели и количества аналоговых каналов. Величина одной клетки по оси времени (абсцисс) составляет 10 мс.
3. Используемое оборудование и ПО.
Для создания измерительно-моделирующей станции, были использованы следующие технические и программные средства:
1. LabVIEW Professional Development System 8.20.
2. LabVIEW 8.20 Real-Time Module for Windows.
3. NIMXI-4.
4. NIPXI-1042.
5. Nl PXI-6733.
6. Аналого-цифровой преобразователь (АЦП) E14-440D.
7. Персональный компьютер (ПК) с операционной системой реального времени.
8. ПК с операционной системой Windows.
ПК с установленной операционной системой Windows, средой LabVIEW Professional Development System 8.20 и LabVIEW 8.20 Real-Time Module for Windows (Host) связан по Ethernet с целевым ПК с операционной системой реального времени (Target). В свою очередь, целевой ПК по средством NI MXI-4 связан с шасси NI PXI-1042, на котором установлена плата NI PXI-6733 (ЦАП).
Для визуализации аналоговых сигналов был задействован третий ПК с подключенным через USB АЦП E14-440D.
4. Внедрение и развитие решения.
Описанный принцип моделирования может быть широко использован для разработки моделей, которые, в свою очередь, могут упростить процесс отладки микропроцессорных систем управления для ЭПС и других систем. Аналоговые сигналы ЦАП могут быть использованы в качестве обратных связей (сигналы датчиков), для определения мгновенных нагрузок на нелинейных элементах (диоды, тиристоры) и для анализа поведения модели работающей совместно с системой управления.
Список литературы
1 Дж. Тревис LabVIEW для всех Москва: ДМК Пресс; ПриборКомплект, 2004. 544 с.
2 Электровоз ВЛ80т. Руководство по эксплуатации / Н.П. Козельский, М.П. Орлов, А.А. Матлахов и др.; Под ред. Б.Р. Бондаренко Москва: Транспорт, 1977. 568 с.
3 В.Е. Розенфельд, И.П. Исаев, Н.Н. Сидоров Теория электрической тяги Москва: Транспорт, 1983. 328 с.
4 Правила тяговых расчетов для поездной работы / П.Т. Гребенюк, А.Л. Долганов, О.А. Некрасов и др.; Под ред. Н.П. Киселевой Москва: Транспорт, 1985. 287 с.
..............................................................................................................................