
НПП Центральная лаборатория автоматизации измерений
111250 Москва, Энергетическая улица, д.7, офис 311
(495) 134-03-49
E-mail: Данный адрес e-mail защищен от спам-ботов, Вам необходимо включить Javascript для его просмотра.
Модельно-измерительный комплекс. Назначение. Состав. Возможности
В настоящее время на кафедре теоретических основ электротехники Томского государственного университета систем управления и радиоэлектроники разрабатывается модельно-измерительный комплекс (МИК)[1]. В его состав входят пакет LabVIEW компании National Instruments и среда моделирования МАРС (СМ МАРС), разработанная коллективом кафедры. В основе СМ МАРС лежит метод компонентных цепей [2,3], что позволяет ей адекватно моделировать системы и процессы любой физической природы [4]. Возможности системы LabVIEW позволяют использовать ее для сбора и обработки данных и управления внешними устройствами, а также для визуализации результатов эксперимента. Функциональная схема МИК представлена на рис.1
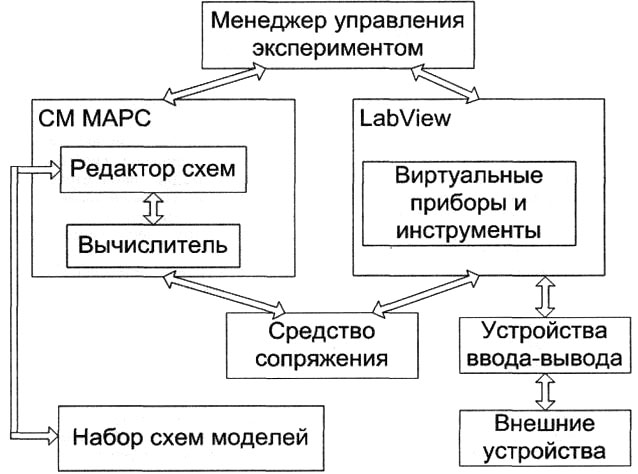
Рисунок 1 - Функциональная схема МИК
В данной системе входные данные с внешних устройств поступают в LabVIEW через устройства ввода-вывода. Затем входные данные, а также сигналы с виртуальных источников LabVIEW через систему сопряжения передаются в СМ МАРС, где производится расчёт параметров модели. Результаты моделирования поступают в LabVIEW тем же способом. Управляющие воздействия на внешние устройства подаются через устройства ввода-вывода LabVIEW.
Разрабатываемый подход позволит объединить возможности сбора данных и управления, предоставляемые LabVIEW с возможностью СМ МАРС моделировать объекты любой физической природы. Полученный модельно-измерительный комплекс (МИК) может применяться как в промышленных, так и в учебных целях. МИК позволяет реализовать модель объекта управления на верхнем уровне АСУТП.
Существует несколько причин использования модели объекта управления на верхнем уровне АСУТП.
1. В настоящее время большое внимание уделяется автоматизации контроля и управления технологическими процессами в условиях нештатных и аварийных ситуаций. Но уровень их сложности настолько высок, что оператор физически не в состоянии быстро и адекватно отреагировать на опасные ситуации и тем более их спрогнозировать. Разработка программ, автоматизирующих этот процесс, пока также не приносит желаемых результатов ввиду сложной логики принятия решений. Традиционные пути решения этой проблемы состоят во введении различного рода экспертных систем (в т.ч. использующих технологии искусственных нейронных сетей). Однако эти системы очень дороги и не всегда надежны, поэтому решение проблемы будет гораздо более простым и дешевым, если спроектировать модель объекта управления более высокого уровня, чем та, которая эмулируется в контроллерах и синхронно эмулировать ее на ПК верхнего уровня. Тогда любые команды оператора сначала следует подавать на вход модели верхнего уровня. Это позволит в реальном масштабе времени, спрогнозировать на ней возможные опасные отклонения технологического процесса. Если, в результате воздействия команды оператора, модель не перешла в аварийное состояние - сигнал управления пропускается в контроллеры нижнего уровня.[5]. Также на вход модели верхнего уровня следует подавать входные сигналы реальной системы для своевременного обнаружения недопустимых комбинаций входных параметров. Этот подход также может использоваться при прогнозировании состояния управляемой системы (при условии достаточного быстродействия моделирующей среды). Упрежденные значения входных параметров при этом необходимо будет рассчитывать при помощи интерполяционных алгоритмов.
2. Использование имитационной модели высокого уровня целесообразно при отладке и тестировании как отдельных подсистем, так и всего проекта АСУТП. Такой подход снижает стоимость разработки проекта АСУТП, а также позволяет уже на этапе проектирования смоделировать и предусмотреть нештатные и аварийные ситуации, экспериментальная реализация которых невозможна, либо нецелесообразна [6]. Также этот подход уже на этапе проектирования позволяет установить соответствуют ли проектные решения техническим требованиям и выбрать лучшие варианты решения [7].
3. Имитационные модели реальных систем найдут применение при разработке тренажеров операторов АСУТП, а также при обучении студентов и инженеров основам SCADA-систем. Моделирование позволяет проводить обучение и тренинг обслуживающего персонала, значительно снижая вероятность возникновения аварийных ситуаций в результате неотработанных или неэффективных управляющих воздействий.
На сегодняшний день некоторые SCADA-системы позволяют реализовывать упрощенные модели объектов управления, однако для целей имитационного моделирования, подразумевающего высокую степень адекватности модели реальному объекту, этих возможностей недостаточно. Для подобного рода задач
целесообразно использовать имитационные модели, создаваемые во внешних специализированных программных пакетах (ПП), но это требует сопряжения моделей с ядром SCADA-системы.
В соответствии с вышеизложенным можно выделить три направления использования МИК:
• прогнозирование в АСУТП;
• отладка и тестирование АСУТП,
• обучение.
Описанная система может быть использована для реализации метода оптимального управления динамическими объектами с использованием прогнозирующих моделей - Model Predictive Control (MPC).
Виртуальная лаборатория по метрологии и электрорадиоизмерениям (МЭРИ) есть применение МИК в учебных целях. Каждый лабораторный стенд состоит из двух частей: схемы эксперимента в СМ МАРС и панели, содержащей источники сигналов, визуальное представление измерительных приборов и алгоритмы обработки, реализованной в LabVIEW. На рисунках 2 и 3 представлены схема эксперимента "Измерение сопротивления мостовым методом" в СМ МАРС и передняя панель этого стенда в LabVIEW соответственно.
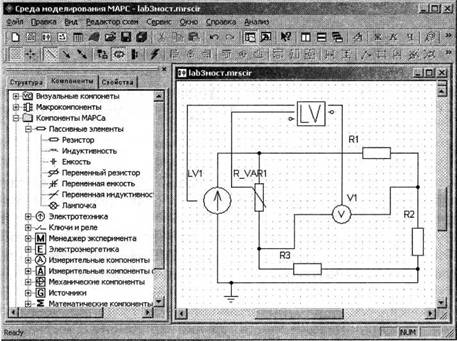
Рисунок 2 - Представление схемы эксперимента в СМ МАРС.
Схема состоит из следующих компонентов: источник сигнала - принимает данные из LabVIEW и подаёт их на вход схемы СМ МАРС; четыре сопротивления, образующие мост. Одно из них является переменным. Значение этого сопротивления также передаётся в СМ МАРС из LabVIEW; вольтметр служит для индикации равновесия моста. Данные с вольтметра передаются из СМ МАРС в LabVIEW; компонент обмена LV, служащий для обмена данными между СМ МАРС и LabVIEW.
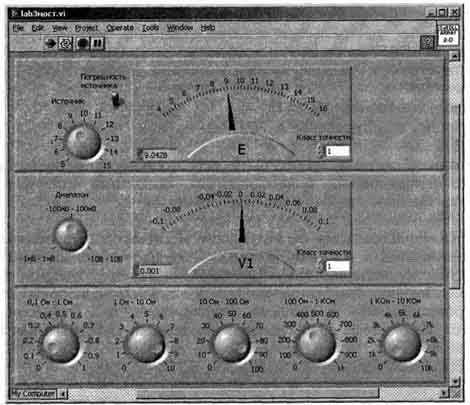
Рисунок 3 - Вид передней панели в LabVIEW
На передней панели располагаются элементы управления и отображения результатов эксперимента: источник сигнала, панель вольтметра, магазин сопротивлений.
Литература:
1 Дмитриев В.М., Бусыгин А.А. Модельно-измерительный комплекс на основе среды моделирования МАРС и пакета LabVIEW // "Приборы и системы. Управление, контроль, диагностика" 2007 №8 С. 54-55.
2 Автоматизация функционального проектирования электромеханических систем и устройств преобразовательной техники / В.М. Дмитриев, Т.Н. Зайченко, А.Г. Гарганеев, Ю.А. Шурыгин. - Томск: Изд-во Том. ун-та, 2000 -292 с.
3. Дмитриев В.М., Лазичев А.А. Многоуровневая система моделирования. // Приборы и системы: Управление. Контроль. Диагностика.2003.№6. С.1-3.
4 Шурыгин Ю.А., Дмитриев В.М., Лазичев А.А. Система моделирования процессов. // Приборы и системы: Управление. Контроль. Диагностика. 2003. №7. С. 1-4.
5 Схемная эмуляция в основе системы графического программирования для АСУТП/ Ковалев С.Э. Промышленные АСУ и контроллеры. 2006 N 1 - С 50-57
6. Имитационное моделирование в задачах разработки АСУТП/ Р. А. Нейдорф, Р.В.Волков. Промышленные АСУ и контроллеры. 2003. N 5. - С. 29-31
7. Система WinGidra и ее применение в решении задач моделирования и анализа трубопроводных сетей/ А.П. Иванов, В.А. Иванов, И.П. Кузьмичев. Промышленные АСУ и контроллеры 2006. № 1. - С. 12-16