
НПП Центральная лаборатория автоматизации измерений
111250 Москва, Энергетическая улица, д.7, офис 311
(495) 134-03-49
E-mail: Данный адрес e-mail защищен от спам-ботов, Вам необходимо включить Javascript для его просмотра.
Виртуальный лабораторный практикум для изучения технологии выращивания полупроводниковых и оптических монокристаллов
1. Постановка задачи
Разработка и внедрение в педагогическую практику современных технологий требует принципиально нового подхода к обеспечению и реализации учебного процесса.
В настоящее время трудно представить полноценную подготовку специалиста по инженерным специальностям без его ознакомления с реальными приборами и оборудованием и получения навыков работы с ними. Одной из важнейших составляющих обучения студентов, способствующих выработке практических навыков, является лабораторный практикум. Учебные лаборатории должны быть оснащены универсальным дорогостоящим оборудованием и современными контрольно-измерительными приборами. Стоимость одного учебного места может достигать нескольких десятков и даже сотен тысяч рублей, что делает невозможным обеспечение каждого студента всем набором необходимых инструментальных средств [3].
Мировая тенденция высшего образования заключается в использовании в учебном процессе виртуальных компьютерных технологий. Учебные программы, моделирующие и симулирующие физические явления, являются действенным инструментом в арсенале преподавателей [5].
Наиболее эффективное усвоение учебного материала происходит в процессе активного взаимодействия с объектом изучения, что возможно либо на этапе лабораторного экспериментирования, либо на этапе имитационного моделирования [4]. То есть там, где учащийся может воздействовать на объект изучения или его модель и получить реакцию на это воздействие.
Проведение эксперимента по выращиванию монокристаллов различного рода на реальных установках и определение оптимальных параметров роста является довольно сложной задачей [1]. Это делает актуальным использование комплекса технических, программных и методических средств, обеспечивающих автоматизированное проведение лабораторных и экспериментальных исследований на математических моделях. Особенно остро необходимость применения математического моделирования в виртуальном лабораторном практикуме (ВЛП) ощущается для дорогостоящих технологий с длительным периодом выращивания, к которым относятся методы Киропулоса, Чохральского (методы выращивания оптических и полупроводниковых монокристаллов) [1].
2. Описание решения
Суть разработанного виртуального лабораторного практикума заключается в замене реального лабораторного исследования на математическое моделирование изучаемых физических процессов [4]. . Виртуальный лабораторный практикум основан на комплексе методов математического моделирования теплофизических процессов, обеспечивающих оптимизацию технологических параметров. В процессе выполнения лабораторного практикума возможно выявить закономерности образования вихревых структур течения, переноса тепла в расплаве в зависимости от скоростей вращения кристалла и тигля, условий нагрева тигля. На основе этих данных возможно:
1) выполнить оптимизацию управляющих параметров процесса применительно к технологиям выращивания оптических и полупроводниковых монокристаллов;
2) изучить способы управления формой фронта кристаллизации на основе применения условий нагрева тигля, изменения скорости вращения, закономерности распределений температур в кристалле и расплаве;
3) сравнить полученные данные с данными реально проведенных экспериментов.
Результатом работы является виртуальная Web-лаборатория, в которой одно учебное место доступно для большого числа обучаемых в любое время. Основу составляет полностью модельный виртуальный лабораторный практикум (ВЛП), который от постановки до получения результатов реализуется посредством компьютерных моделей. Структурная схема лабораторного практикума представлена на рисунке 1.
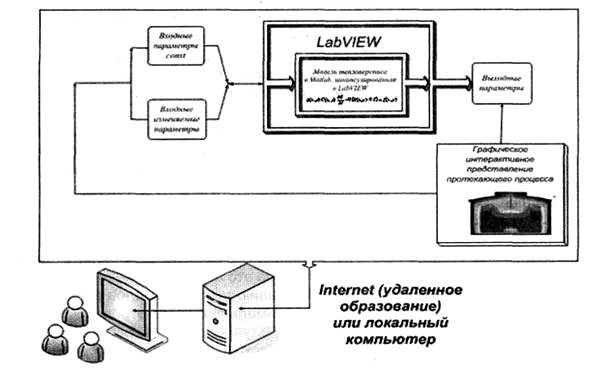
Рисунок 1 - Структурная схема лабораторного практикума
Передача данных между дистанционными пользователями и главным сервером организована следующим образом: пользовательский ПК не нуждается в оснащении специализированным программным обеспечением (необходим только стандартный Интернет-обозреватель). Пользовательский интерфейс в этом случае публикуется в глобальной сети, в то время как сама программа, его реализующая, запущена на главном сервере системы, где так же работает LabVIEW Web-сервер, обслуживающий запросы пользователей.
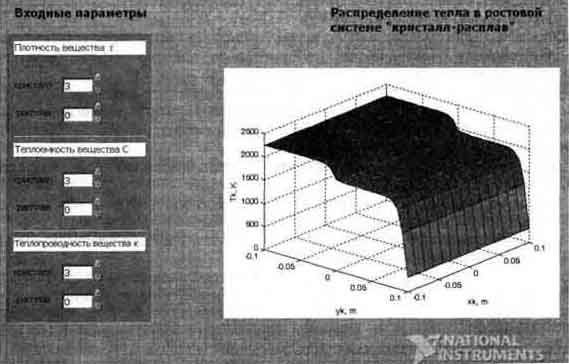
Рисунок 2 - Интерфейс пользователя
По запросу пользователей происходит выдача web-страницы со встроенным в нее ActiveX-объектом, обеспечивающим взаимодействие с сервером [3].
В качестве протокола передачи данных, в этом случае, был выбран протокол HTTP, являющийся открытым и разрешенным даже в условиях максимально ограниченного доступа в сеть Интернет.
Оценка применимости предлагаемых математических моделей теплопереноса проводилась на основе методических расчетов тестовых задач, вычислительного эксперимента, сопоставлении полученных результатов с экспериментальными данными [1].
Применение в учебном процессе ВПЛ дает следующие преимущества:
1. Достигается экономия учебных площадей, оптимизируется учебное расписание, достигается экономия средств, затрачиваемых на лабораторное оборудование.
2. Сокращается время на подготовку и проведение лабораторных работ, приобретаются навыков использования современных математических пакетов.
3. Повышается качество обучения, так как студент выполняет лабораторную работу индивидуально.
4. Виртуальные средства становятся мощным дидактическим инструментарием для обучаемых с целью приобретения и закрепления практических навыков.
5. Применение моделирования позволяет получить и проанализировать данные о физическом процессе, находить оптимальные условия роста кристаллов и наблюдать в графическом виде результаты. Представляется возможность сравнить результаты моделирования сданными реально проведенных экспериментов.
3. Используемое оборудование и программное обеспечение
Программное обеспечение лабораторного практикума включает следующие подсистемы:
1) управляющую;
2) моделирования;
3) формирования итогового отчета.
Управляющая подсистема содержит описание моделируемой системы и последовательность выполнения лабораторной работы. Подсистема имеет дружественный интерфейс.
Подсистема моделирования осуществляет программную имитацию исследуемого объекта на базе определенной математической модели. Используемая моделирующая программа обеспечивает: наглядное графическое представление моделируемого объекта.
Для математического моделирования использовался язык технических расчетов MATLAB 7.0.4 [5].
Комплекс работает под управлением ОС Microsoft Windows и представляет собой набор программ, использующих технологии National Instruments.
Среда графического программирования LabVIEW 8.20 для создания ВЛП была выбрана по следующим причинам:
- простота и удобство использования при программировании, что позволяет значительно сократить временные затраты на разработку и отладку ПО, сетевого взаимодействия;
- наглядность и простота освоения, что существенно расширило круг людей, способных участвовать в создании и доработке ВЛП;
- возможность легко и быстро создавать практически любой необходимый и удобный в использовании графический и пользовательский интерфейс;
- широкий набор функций в стандартных библиотеках обработки сигналов и математических библиотеках;
- наличие набора функций, позволяющих легко организовать взаимодействие между разработанным приложением и глобальной сетью.
4. Внедрение и развитие решения
Разработанные виртуальные лабораторные работы планируется апробировать в учебном процессе в рамках локальной сети кафедры «Нанотехнологии и материалов электронной техники».
Планируется внедрить разработанный ВЛП в научно-исследовательской работе, где лабораторный практикум будет не полностью модельным, а данные будут сниматься непосредственно с датчиков экспериментальной ростовой установки. Это позволит студентам, аспирантам, а также операторам ростовых установок, более наглядно видеть моделируемый процесс.
По описанной технологии будут разрабатываться виртуальные лабораторные практикумы по другим изучаемым дисциплинам.
Список литературы
1. Б.М. Синельников Технология синтеза монокристаллов Ставрополь: СевКавГТУ, 2006. 248 с.
2. А.Я. Суранов LabVIEW 7: справочник по функциям. Москва: ДМК Пресс, 2005.512 с.
3. Информатизация инженерного образования: Электронные образовательные ресурсы МЭИ / Под ред. СИ. Маслова Москва: Совет МЭИ по дистанционному обучению, 2005. 160 с.
4. М.М. Gonik, M.A. Gonik Application of visualization technique for study and control of heat and mass transfer in crystal growth, The Intern. Conf. "Single crystal and their application in the XXI century-2004", VNIISIMS, Aleksandrov.
5. E.A. Рындин, И.Е. Лысенко Решение задач математической физики в системе MatLab: Таганрог: Изд-во ТРТУ, 2005. 62 с.