
НПП Центральная лаборатория автоматизации измерений
111250 Москва, Энергетическая улица, д.7, офис 311
(495) 134-03-49
E-mail: Данный адрес e-mail защищен от спам-ботов, Вам необходимо включить Javascript для его просмотра.
Перспективы использования машинного зрения в составе системы управления движением экраноплана
1. Постановка задачи
В КГТУ им. А.Н. Туполева в течение 15 лет ведётся разработка экраноплана «Речное такси» - летательного аппарата, основным режимом движения которого является полёт над водной поверхностью (высота полёта 0,2-1,0 м), благодаря чему возникает так называемый экранный эффект; увеличение подъемной силы крыла и снижение его аэродинамического сопротивления при полете над ровной поверхностью. Летом 2007 года были проведены успешные лётные испытания экспериментальной модели.

Рис.1 Экраноплан «Речное такси»
Крейсерская скорость экраноплана составляет 150 км/ч, и, учитывая малую высоту полёта (до 1 м), можно сделать вывод: при внезапном возникновении препятствия (например, лодки) пилот может не успеть среагировать и избежать столкновения. Возникает необходимость разработки автопилота экраноплана, способного находить препятствия, возникающие по курсу движения, определять их размеры и расстояние до летательного аппарата и передавать управляющие воздействия на основе этой информации на руль высоты.
2. Описание решения
Было принято решение: для создания автопилота использовать принципы машинного зрения, в частности, машинного стереозрения, которое позволяет определять расстояние до объекта. Реализовывать систему машинного зрения (СМЗ) было решено на базе программно-аппаратных средств компании National Instruments.
За аппаратную основу взята система машинного зрения NI CVS-1455, ориентированная на работу с несколькими камерами. CVS поддерживает интерфейс IEEE 1394a (FireWire), на основе чего и была выбрана камера Firefly MV, которая не смотря на компактные размеры имеет хорошие характеристики и предназначена для использования в системах машинного стереозрения.
Важнейшим этапом создания СМЗ является программное обеспечение. Для пассивного измерения расстояний при помощи стереозрения сигналы от двух камер обрабатываются совместно для получения информации о третьей координате объектов - глубине. Требуется снимать изображения с двух камер, находящихся на некотором расстоянии друг от друга, и находить корреляцию между участками правого и левого изображений для составления карты диспаратностей (количественно диспаратность для данного случая можно определить как разность между координатами объектов на изображениях, полученных с камер, измеряемую в пикселях). По карте диспаратностей можно восстановить трехмерную сцену и получить информацию о расстояниях до объектов. Существуют разные алгоритмы восстановления трехмерных сцен, и на данном этапе разработки СМЗ производится анализ методов [2], [3], [5] с целью выбора оптимального по точности и требуемым вычислительным ресурсам.
Алгоритм обработки стереопар и выработки соответствующих управляющих воздействий для исполнительных механизмов будет реализован в среде LabVIEW 8.0 с использованием программного модуля Vision Development Module. Также разрабатывается алгоритм, который позволит СМЗ получать информацию о скорости перемещения экраноплана (относительно видимых камерами объектов) и о его положении в пространстве. СМЗ даёт возможность извлекать из видеосигнала множество информационных параметров, необходимых для управления экранопланом.
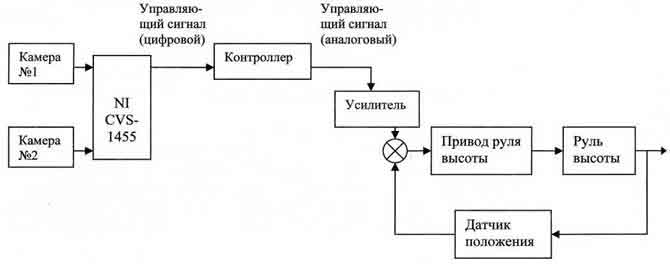
Рис. 2 Структурная схема системы управления высотой полёта экраноплана
При обработке изображений информация о расстоянии до выявленных объектов и их размерах будет использоваться для автоматического принятия решений об изменении высоты полёта экраноплана (рис. 2). С двух камер будут синхронно, по сигналу от внешнего триггера, захватываться изображения и через интерфейс FireWire поступать в CVS-1455, где будет производиться анализ информации и выработка управляющих воздействий. При приближении объекта, находящегося прямо по курсу, управляющее воздействие, выработанное СМЗ, будет передаваться по интерфейсу RS-232 на контроллер, где будет преобразовываться в аналоговый сигнал и подаваться на усилитель мощности. Усиленный сигнал будет управлять приводом исполнительного механизма для увеличения высоты полёта и обхода препятствия в вертикальной плоскости.
3. Используемое оборудование и ПО
Nl CVS-1455;
Point Grey Research Firefly MV FFMV-03MTC IEEE1394 Camera - 2 шт;
LabVIEW8.0;
LabVIEW Real-Time Module; . .
LabVIEW Vision Development Module;
NI-IMAQ for IEEE 1394 Cameras Driver Software.
4. Внедрение и развитие решения
По окончании программной доработки проекта систему машинного стереозрения планируется внедрить в состав автопилота экраноплана. Также, с некоторыми аппаратными и конструктивными изменениями, такая СМЗ может быть установлена на различных беспилотных транспортных средствах, на автомобилях для нахождения и обхода препятствий на скоростных трассах. Система машинного стереозрения также может использоваться для навигации мобильных роботов, в системах динамического контроля обстановки, в телевизионных системах охранного назначения.
Список литературы
1. Д. Форсайт, Ж. Понс Компьютерное зрение. Современный подход. : Пер. с англ. - М. : Издательский дом «Вильяме», 2004. - 928 с.
2. Hans P. Moravec Robot Spatial Perception by Stereoscopic Vision and 3D Evidence Grids, CMU Technical Report CMU-RI-TR-96-34, 1996.
3. C. Lawrence Zitnick, Takeo Kanade A Volumetric Iterative Approach to Stereo Matching and Occlusion Detection, CMU Technical Report CMU-RI-TR-98-30, 1998.
4. Системы технического зрения / A.H. Писаревский, А.Ф. Чернявский, Г.К. Афанасьев и др.; Под ред. А.Н. Писаревского. -Л.: Машиностроение. Ленингр. отд-ние, 1988.-424 с.
5. D. Магг, Т. Poggio Cooperative Computation of Stereo Disparity // Science, New Series, Vol. 194, No. 4262. (Oct. 15, 1976), pp. 283-287.
..............................................................................................................................